
Autonomous UAV

Project
Demonstrate complex relative feedback control through the development of a semi-autonomous UAV without the aid of GPS. The project was further defined to require maintaining position with +/- 2 feet and maintaining yaw position within +/- 3 degrees within 10 seconds.
This project covered the entire engineering development lifecycle for autonomous vehicles as well as control loop development and flight testing. Hardware selection, mounting design, wiring and electronic signaling, as well as coding and control loop tuning were all required for the project. Proof of concept, tethered, and full flight testing was conducted to confirm successful development.
Solution
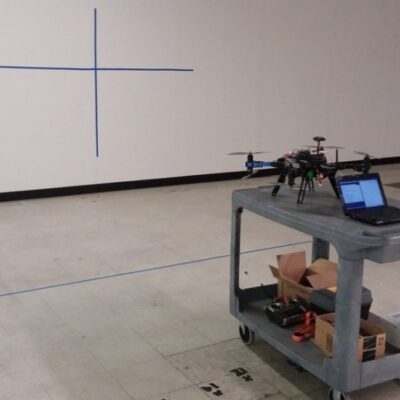
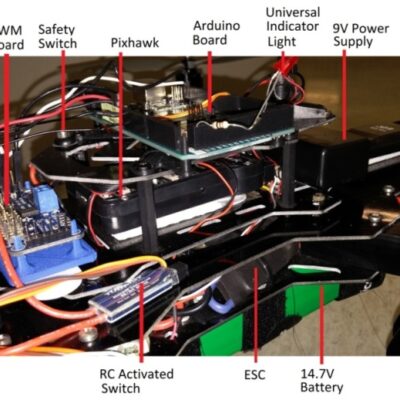
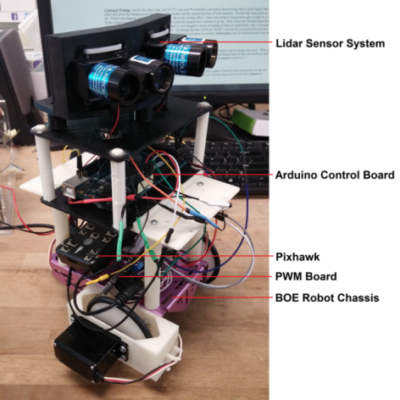
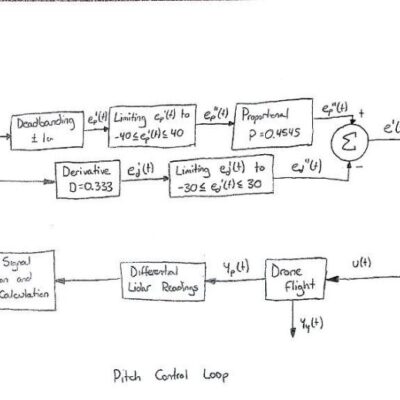
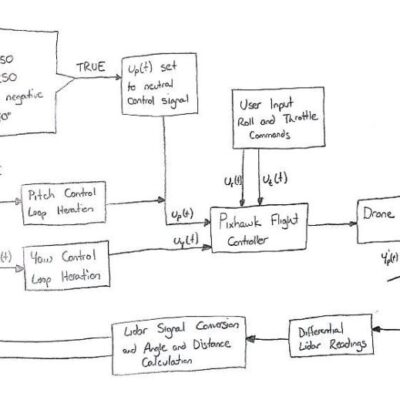
An off-the-shelf drone was heavily modified to fly a Lidar differential sensor package, an Arduino control loop processor and output controller, and other supporting peripherals to support complex relative feedback control loops. The automation consists of dual control loops to maintain hard-coded yaw and position values relative to a flat wall.
Result
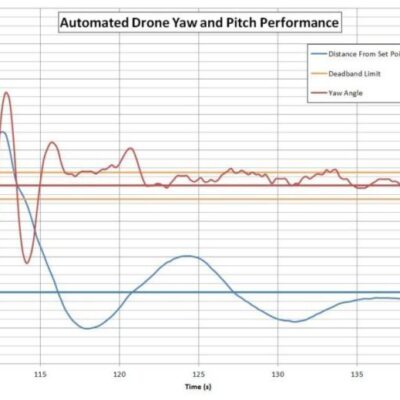
The drone would maintain position within +- 2 feet and maintain yaw position within +-3 degrees, both with a settling time of approximately ~7 seconds. The project consisted of three phases of development, Phase 1 being the discovery and conceptual testing phase, Phase 2 being a non-flying control loop proof-of-concept demonstration phase, and Phase 3 being the final demonstration phase where all control systems are integrated, deployed, and demonstrated on a UAV.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}