
Control Loop System
Project
Develop a 4th order or higher system that incorporates two separate modes of mechanical actuation to exhibit feedback control.
Solution
A semi-balanced cantilever beam, with a ball in an airflow-protected track, was constructed that incorporates an RC propeller motor and ducted fan to control the angular tilt of the beam and airflow through the propeller. Using sensors pointing inside the tube and on the beam pointed at the ground, the system could move the ball to a user-adjustable set point.
Results
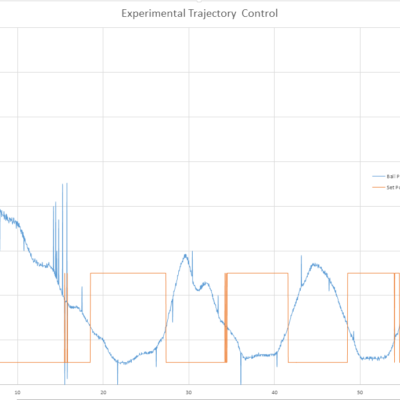
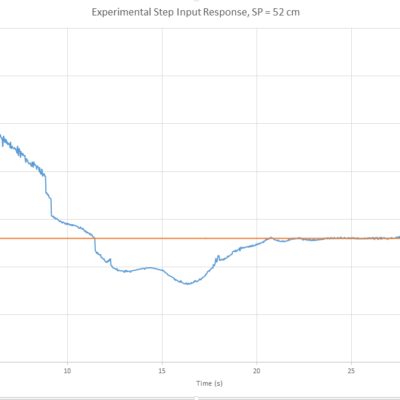
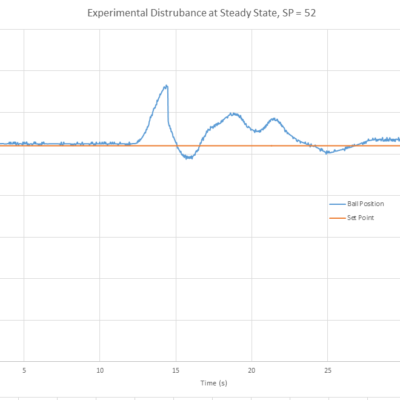
The ball balancing beam had a +-2cm resolution of a set point, with a 10-second settling time. The beam could perform trajectory following, as well as handle disturbances.



{kind=link}
{kind=link}
{kind=link}