
Autonomous Guided Vehicles
Project
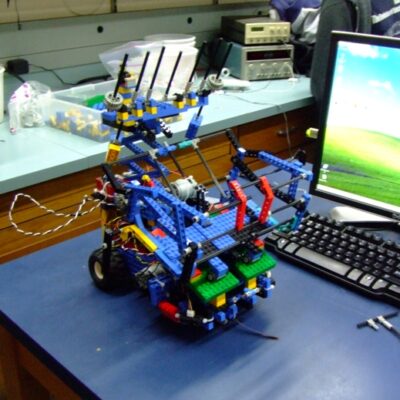
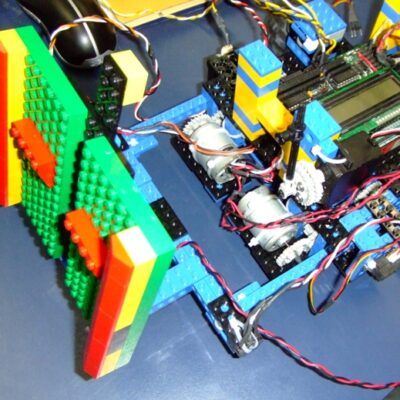
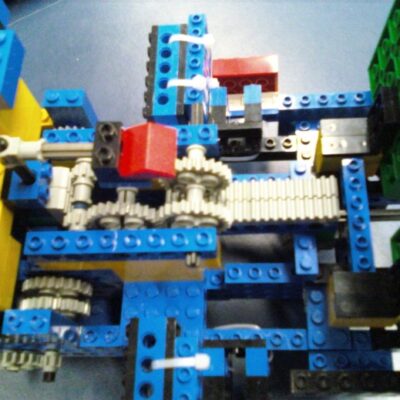
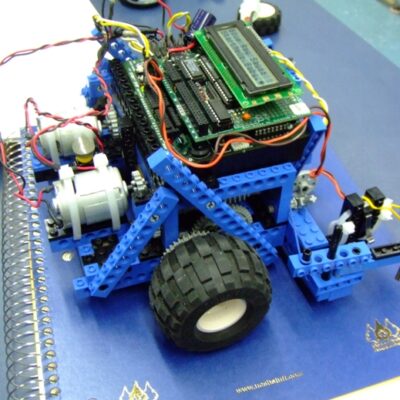
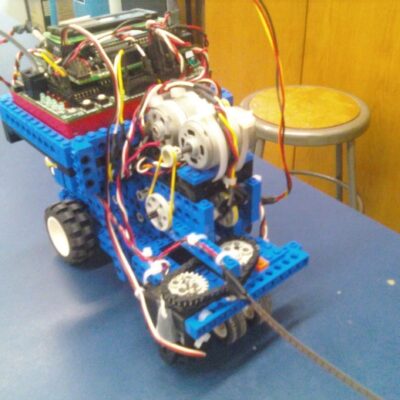
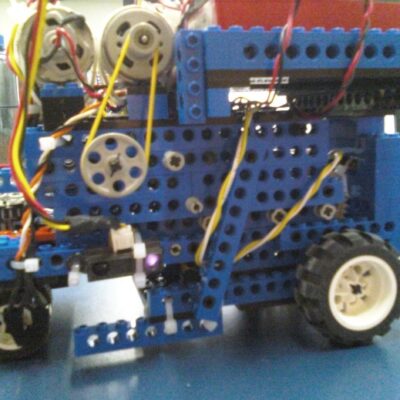
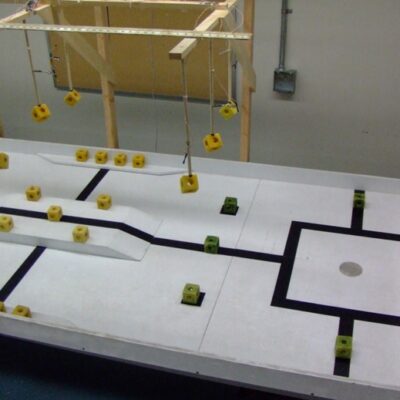
Develop a series of robots to explore the functionality of sensors, actuators, motors, legos, gears, and the Handy board – a precursor to the Arduino board. Demonstrate robotic motion techniques including proportional wall-following control, line following, object interaction, and spacial recognition. Demonstrate object interaction with the final project by collecting foam blocks onto a robot and, for a bonus, delivering them onto a wall.
Solution
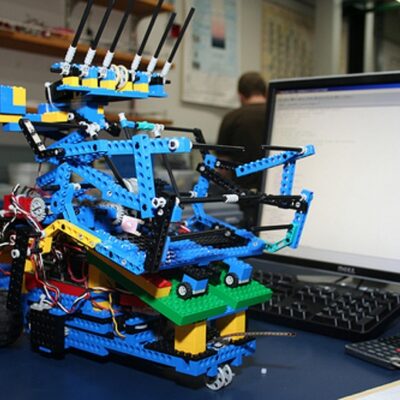
Three notable robots were created, including the Blue-Ray, a wall-following and line-following demonstration platform, the Servo-differential robot, for design change validation and exploration, and the crane robot, the final robot built to collect hanging foam blocks and deliver them onto a wall.
Result
All robots performed well. Blue-Ray and servo-differential were purely demonstrator platforms but would operate and function as needed. The crane robot performed very well, achieving project objectives by collecting foam blocks, and placing 2nd place in a robot performance competition at the school.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}